戞廫屲夞抦擻儘儃僢僩僐儞僥僗僩偵弌応偟僥僋僯僇儖僐乕僗偱桪彑偟偨儘儃僢僩偱偡丅


惂屼丒婡夿峔憿偺娙扨偝傪峫偊偰儔僕僐儞梡偺僒乕儃儌乕僞亊係傪巊偄傑偟偨丅
崻尦偺僒乕儃儌乕僞偑僩儖僋晄懌偵側偭偨偺偱搑拞偱10kgm偺嫮椡側傕偺偵庢傝懼偊傑偟偨丅
僴儞僪撪晹偵暔懱偑捠夁偟偨偺傪敾暿偡傞僙儞僒乕偲丄僇儔乕僙儞僒乕傪偮偗傑偟偨偑丄 寢嬊僇儔乕僙儞僒乕偼惛搙丄挷惍帪娫晄懌摍偺栤戣偱杮斣偱偼巊傢偢丄 暔懱僙儞僒乕偵傛偭偰崅偝傪尒偰懳徾傪敾暿偟傑偟偨丅
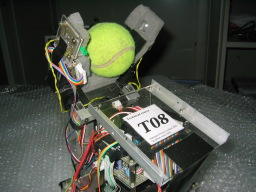
捦傫偩傕偺傪慡晹僑乕儖傑偱塣傫偱偄偨傜帪娫偑懌傝側偄偙偲偑敪妎偟偨偺偱丄 嬯擏偺嶔偱庢傝晅偗傑偟偨丅庤庱傪怳傝丄惃偄傪偮偗偰僥僯僗儃乕儖傪搳偘攚柺斅傪揮偑偟偰僑乕儖傪慱偄傑偡丅
偙偺儅僔儞偺傎傏桞堦偲偄偭偰偄偄偔傜偄偺摿挜偱偡乧丅偁偲偼柍擄側摦偒偟偐偟傑偣傫乧丅
偨偩杮斣偱偼僒乕儃儌乕僞偺揹尮揹埑偺崅偡偓乮晛抜偼僼儖廩揹偱楙廗偟偰側偐偭偨偺偱乧(^_^;)乯偱儕儕乕僗偺僞僀儈儞僌偑偢傟偰幐攕偟偰偟傑偄傑偟偨丅
抦幆晄懌偱帺暘偱偼愝寁偱偒側偐偭偨偺偱怷塱偝傫偺 儅僀僋儘儅僂僗岺朳偺BasicMouse偺 儌乕僞乕僪儔僀僶夞楬傪嶲峫乧偲偄偆偐傎偲傫偳偦偺傑傑巊傢偣偰偄偨偩偒傑偟偨(^_^;)
巊梡偟偨儌乕僞傕傑偭偨偔摨偠暔偱偡丅偨偩彮偟儌乕僞偑僷儚乕晄懌側姶偠偑偟傑偟偨乮彮偟偺抜嵎偱偡偖偵扙挷偡傞乯丅 揹埑(侾俀倁)偑掅偐偭偨偺偐丄婡懱偵懳偟偰儌乕僞偑彫偝偡偓偨偺偐偼撲偱偡偑乧丅
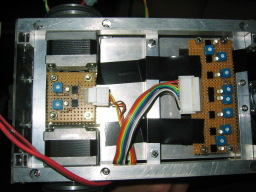
S7136 傪巊偭偰嶌傝傑偟偨丅昁梫側婡擻偑俬俠堦屄偵偮傑偭偰傞偺偱偐側傝妝偑偱偒傑偡丅杮斣偺戜偱傕挷惍偣偢偵偪傖傫偲摦偒傑偟偨丅
慜曽偵8屄丄屻曽偵2屄偲傝偮偗傑偟偨偑丄寢嬊慜曽偺8屄偟偐巊偄傑偣傫偱偟偨丅
俆偮偺僄儕傾偛偲偵暿偗偰扵偟偵偄偭偰丄嵍塃偵儅僔儞傪傆偭偰嫍棧僙儞僒乕(PSD)偵傛偭偰懳徾傪扵偟傑偡丅
懳徾偑榞偺抂偭偙偵偔偭偮偗偰偍偄偰偁偭偨傝偟偨傜寢峔旝柇偱偟偨乧丅偒偭偲偦傫側攝抲偵偼側傜側偄偲怣偠偰乧丅
儃乕儖偺崅偝偑嫞媄戜偺巇愗傝傛傝崅偄偙偲傪棙梡偟偰丄嬿偭偙偺儃乕儖偺慜傑偱峴偭偰傾乕儉傪儃乕儖偺忋偵壓傠偟偰丄傾乕儉傪儃乕儖偲愙怗偝偣偨傑傑僶僢僋偟偰丄儃乕儖傪抂偭偙偐傜堏摦偝偣偨屻偵PSD偱扵偟偰僑乕儖傑偱帩偭偰偄偒傑偡丅
嵟屻偺嵟屻傑偱偳偆傗偭偰庢傞偐寛傔偰偍傜偢丄夛応偵偮偄偰偐傜幚憰偟偨偺偱堦夞偟偐摦嶌僥僗僩傪偱偒偢丄 偐側傝怱攝偱偟偨偑丄側傫偲偐偆傑偔偄偒傑偟偨丅

儖丄儖儞僶偱偡偐乧乮娋乯