ロボット製作者の方や、もっと詳しく知りたい方は詳説の方も併せてご覧ください。
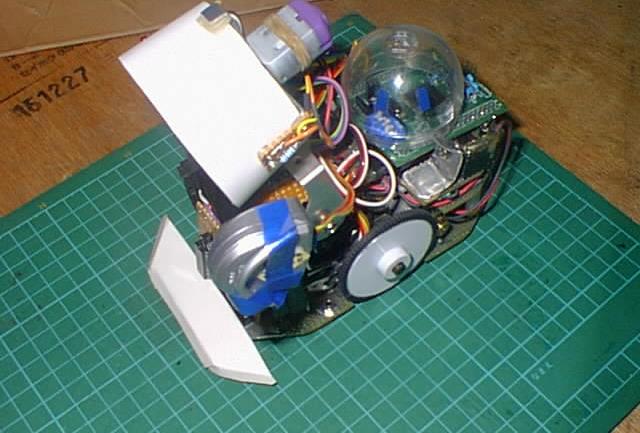
世紀末の火鼠をもとに機能を追加したマシンです。ファンでボールを吸い付けて運びます。高速走行が特徴です。
知能ロボコンに出場しましたが作りこみの甘さのため予選敗退となってしまいました。翌年改良されて「風兎2005」として出場し、見事優勝しました。
| 前後長 | 150mm |
|---|---|
| 幅 | 80mm |
| 高さ | 130mm(アームを上げた時) |
| 質量 | 0.57kg |
| 最高速度 | 1200mm/s(無制御で直進時) |
知能ロボコン参加ロボットの中ではかなり小さい方に入ります。一応ながら手乗りサイズです。移動速度は速いです。特にコーナーでの走りは他のロボットに引けを取りません。
後ろの電子回路の上に乗っている透明な半球は頭のつもりです。
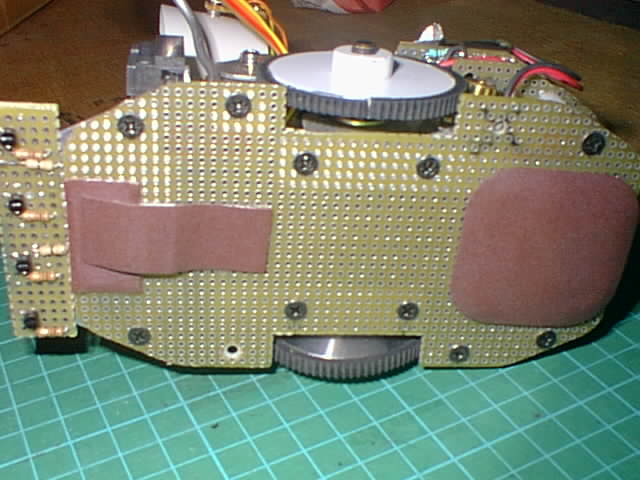
グリップを上げるためにタイヤはギザギザのゴムになりました。
摩擦の小さいシート(商品名:カグスベール)を補助輪の代わりにしています。後ろには普通に固定し、前にはシートの弾性を利用してサスペンションの役割を持たせたものをつけてあります。
左右の車輪を別々のモーターで回しています。
主電源はニッケル水素電池6本です。
ファンのモーター(タミヤ・レブチューン)用には別に2本のニッケル水素電池を使用しています。

内蔵コンピューターで制御される完全自立型ロボットです。走行や対象物の探査などの動きをプログラムに従って行います。
タイヤの回転数を使って真っ直ぐ走るモードと、ラインに沿って走るモードの2つのモードを組み合わせて走行しています。コーナーでは速度を落とす必要があるので、ラインに沿って走りながらタイヤの回転数から距離を計算し、コーナーが近づいたと思ったら減速します。
知能ロボコンのカーブは本物の道路のカーブと違って曲率が不連続に変化する等条件が厳しいのでコーナーを抜けた後まで安全に走行する必要があるようです。
前方には赤外線を発して反射光を見るセンサーが付いていて、ボールを探すことが出来ます。左右に2つあるのでどちら側に行けばボールがあるのかが簡単に分かります。

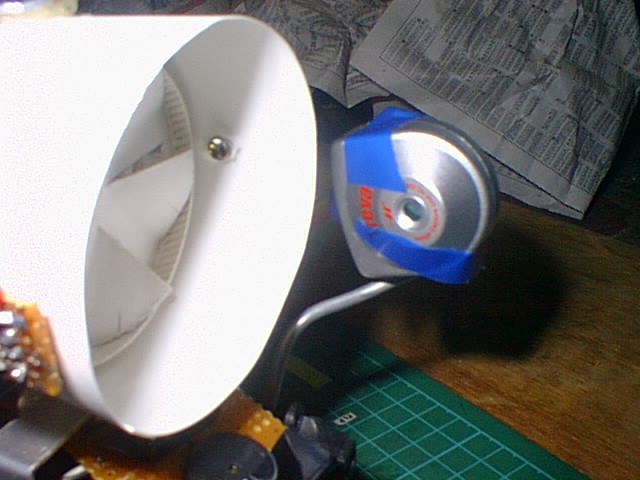
アームを下げてファンを回しながらボールに近づいていくと、ボールが吸い付いてきます。ボールが飛び上がってくっついてきます。ボールが入ったらハンドの中のセンサーで検知して持ち上げます。
アームを上げると本体左側のカメラにボールが写るようになるので、この状態で色を見分けます。間違えないように、4回連続で同じ答えが出た場合だけを採用します。それぞれのボールがどんな色なのかはあらかじめ覚えさせてあります。
ゴール前までラインを頼りに移動し、ゴールの方を向いてファンを止めます。高い位置からボールが落下してロボット前方下部のバンパーにボールが当たり、反発で前に転がっていきます。これを使って遠距離からシュートします。1m程度の距離を転がすことが出来ます。
一次予選では自由ボールと競技台のボールをシュート成功したのですが、欲張ってリトライをした結果だんだん動きが悪くなり、最後のリトライではスタートに失敗して止まってしまったかに見えました。運良く復帰したものの自由ボールをシュート失敗しました。黄色のボールを取ってきたもののゴール前に自由ボールが立ちふさがる格好になっていて万事休すかと思いましたが運良くゴールに入り、3点となりました。
敗者復活戦ではボールが全く持ち上がらなくなってしまいました。ロボットはボールを落したのに気づいて何度もやり直しますが、駄目でした。
高速な移動、ボールの探索、色識別、ボールの運搬と一通りの機能は動いていただけに残念です。
来年また再挑戦する予定です。基礎部分は出来ているのであとは完成度を上げることに専念したいと思います。
改良されて翌年の2005年大会に「風兎2005」として出場し、見事優勝しました。また、ロボット学会会長賞を受賞しました。

昨年に続き、知能ロボコンのプロモーションビデオが公開されました。風兎も2番の映像の終わりの方に少しだけ出して頂いています。(頭部の向きが)カメラ目線になっていないのが残念です。
文・ロボット製作:山口辰久