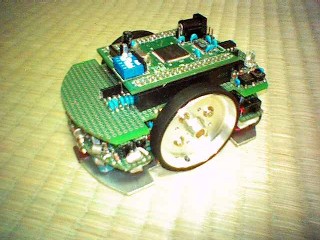

| 全長 | 112 [mm] |
|---|---|
| 全幅 | 77 [mm] |
| 高さ | 63 [mm] |
| タイヤ | 直径 48 [mm] 幅 7 [mm] |
| 総重量 | 約 320 [g] |
| CPU | H8-3069 秋月のマイコンボードキット |
| 電源 | ニッケル水素電池 単4×6 |
| モータ | コアレスDCモータ×2 並木モータ SCL12-3005 |
| ギア比 | 7:1 |
| センサ | フォトセンサ×6 |
| 制御可能な 最高速度 | 2500 [mm/s] |
|---|---|
| スラローム時の 安全な速度 | 650 [mm/s] |
| スラローム時の 危険な速度 | 750 [mm/s] |
| 加速度 | 4500 [mm/s^2] |
| 探索走行時の 速度 | 450 [mm/s] 固定 |
| センサ感度 (最大距離) | 140 [mm] |
duty = a * speed + b * torque ということです。(a,bは実定数)
target_speed実際の速度をspeedとすると、
acc = target_speed - speed;
accには当然上限と下限を設定してある。)
x進んだところでtarget_speedの速度になるように減速するとすると、
acc = (target_speed^2 - speed^2) / (2 * x);(高校で習う公式です。)
| 中部地区初級者大会 | 完走ならず・・・ |
|---|---|
| 中部地区大会 | 未だに二次走行のプログラムを書いていないが、 探索には成功。『31秒633』。 |
| 学生大会 | 二次走行に初成功。『13秒394』。 |
| 全国大会 | エキスパートクラス予選。『12秒299』。 決勝。二次走行に失敗。『59秒576』で15位。 |